Date: April 2022
Task B PID Stunt
I started the midline of the car 114 inches from the wall which is just under 3 meters (2.8956m). The piece of tape marking the starting line was gone, but I could see the outline of where it had been. I never got the Kalman Filter to work well, so I estimated the distance to start the drift to be 1500 mm (1.5 m) through several tests. Because the car is accelerating somewhat unpredictably as it starts from rest and move towards the car, extrapolating the TOF data wasn’t super accurate, so I decided not to use this approach either.
Open loop Stunt
My stunt is to drive up a ramp (made from a binder), make a jump, land, pause, then do a spin to show the car survived!
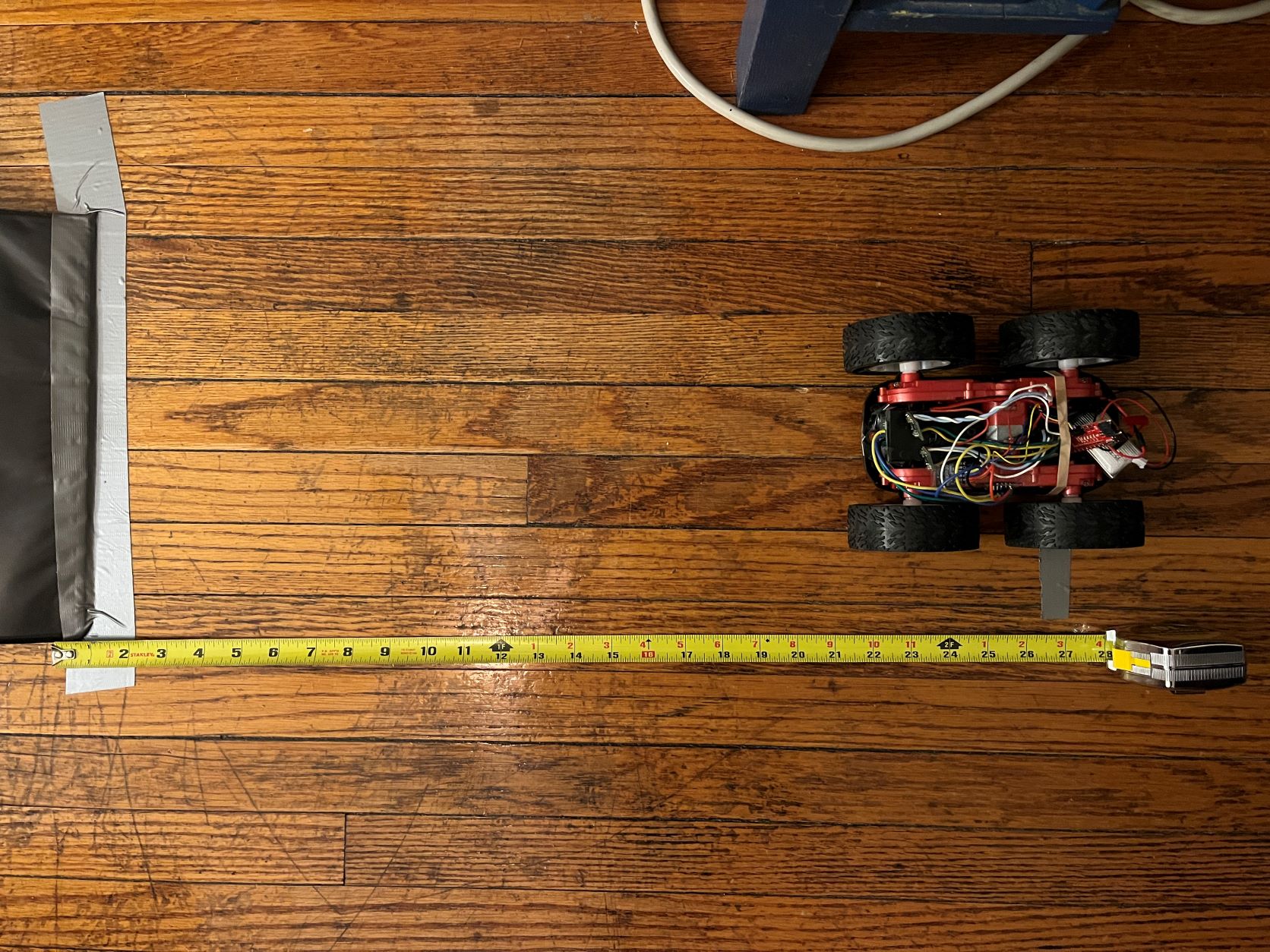
I started the front of the car 20 inches from the beginning of the ramp.
Here’s the code:
static int spd = 145;
// Stop
analogWrite(MD1_xIN1, 0);
analogWrite(MD1_xIN2, 0);
analogWrite(MD2_xIN1, 0);
analogWrite(MD2_xIN2, 0);
delay(4000);
//Forward
analogWrite(MD1_xIN1, spd);
analogWrite(MD1_xIN2, 0);
analogWrite(MD2_xIN1, 0);
analogWrite(MD2_xIN2, 1.3 * spd);
delay(1000);
// Stop
analogWrite(MD1_xIN1, 100);
analogWrite(MD1_xIN2, 100);
analogWrite(MD2_xIN1, 100);
analogWrite(MD2_xIN2, 100);
delay(1000);
//Spin CCW
analogWrite(MD1_xIN1, spd);
analogWrite(MD1_xIN2, 0);
analogWrite(MD2_xIN1, spd);
analogWrite(MD2_xIN2, 0);
delay(2500);
The 1.3 is a calibration factor to make the car drive straight.
Blooper ?
I wouldn’t really call this a blooper, but I originally tested my stunt with a softer landing!